

当前工业协作机器人正成为轻工制造数字化转型的核心载体,鞋服作为万亿级轻工赛道,由于产品多为柔性非标准化件、品类迭代速度快,面向细分场景的专用训练数据稀缺,长期制约着机器人灵巧操作技术在鞋类智造领域的落地效率。近日,机器人技术厂商Vertax正式发布huili_shoe_insole_retrieval_and_packing_0602机器人学数据集,该数据集于2026年7月1日首发于全球最大的AI开源社区HuggingFace,定向支撑机器人灵巧操作、鞋类自动化包装等领域的技术研发。
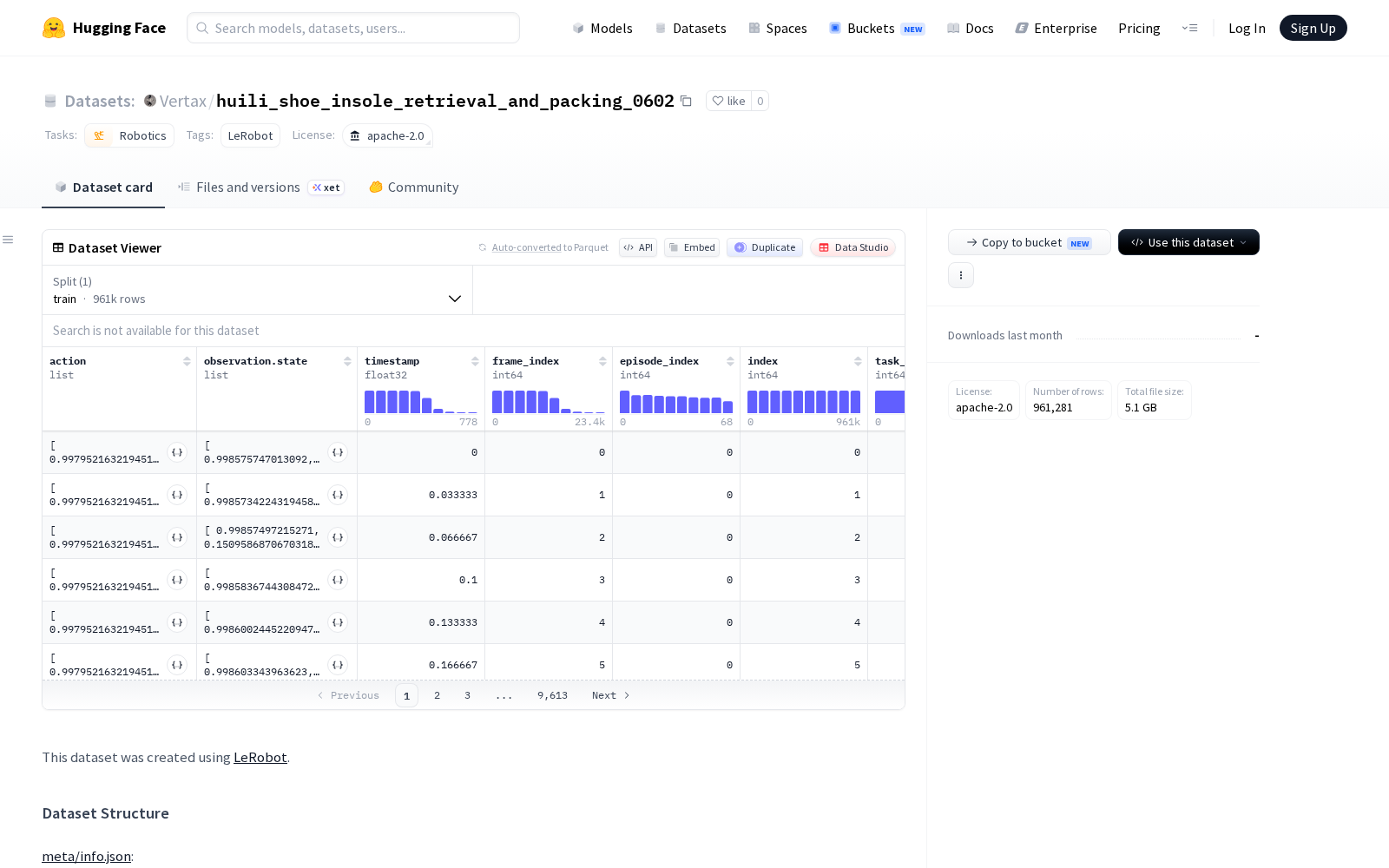
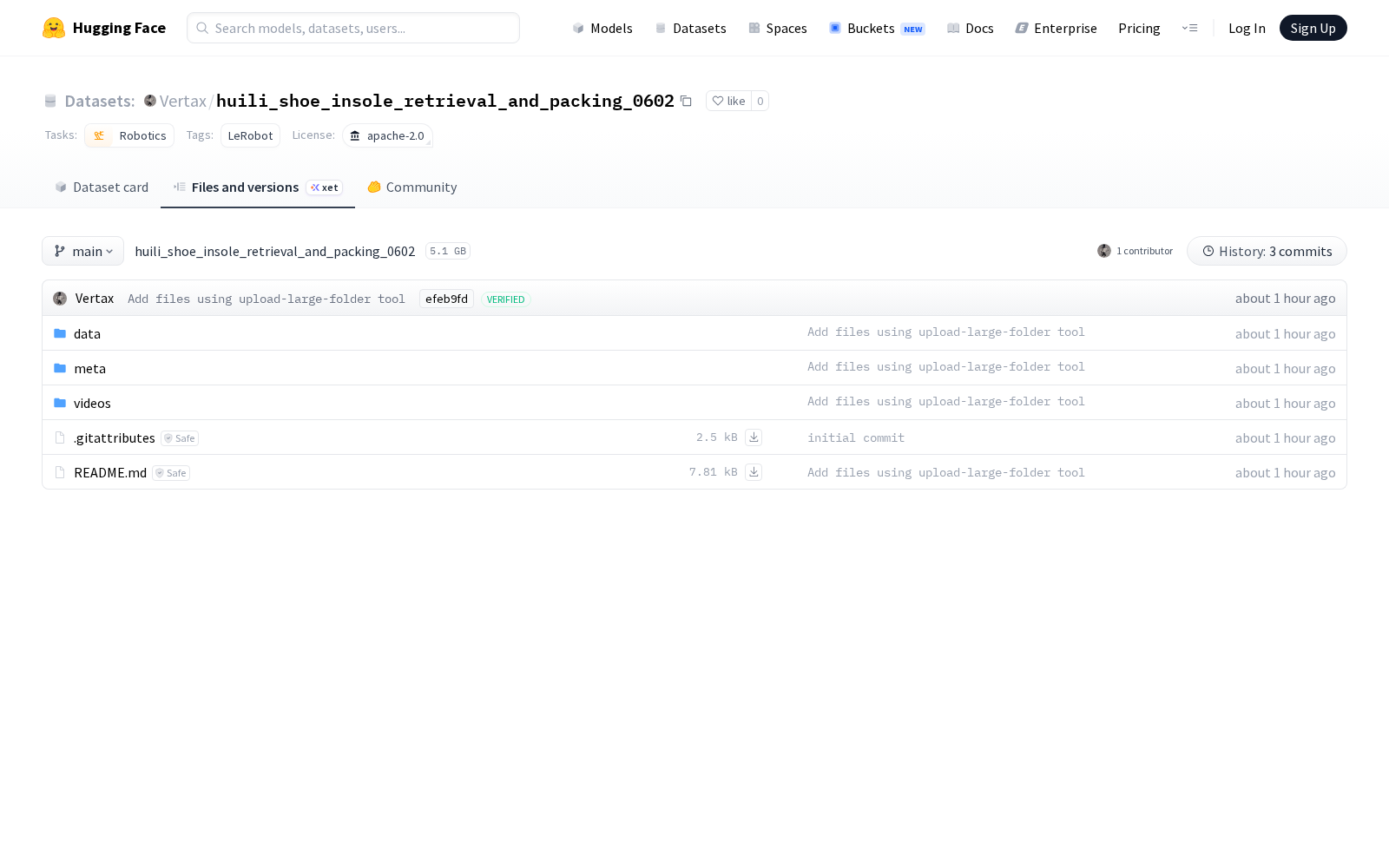
据公开信息显示,本次发布的数据集基于LeRobot框架创建,专门适配双Flexiv Rizon4机器人平台的训练需求,共包含68个训练集片段,总帧数达949788帧,帧率为30fps,其中结构化数据文件大小为100MB,配套视频文件大小为500MB,是目前少见的覆盖鞋类制造后端包装环节的公开多模态机器人数据集。
从数据构成来看,该数据集覆盖了机器人操作全链路的多维度数据特征:首先是20维动作与状态观察浮点数数据,可完整还原左右机械臂的TCP位置、旋转角度及夹爪开合状态;其次是多视角图像观察数据,包含机器人头部摄像头、左右手腕摄像头及左右触觉传感器采集的彩色视频数据,分辨率分别为480x640和400x700,可真实还原操作场景的视觉、触觉反馈;此外还配套有时间戳、帧索引、片段索引、任务索引等元数据,可满足不同算法训练的标注需求。
该数据集可广泛应用于机器人控制算法研发、模仿学习训练、强化学习模型迭代等方向:在鞋类制造场景下,可用于训练适配不同材质、不同尺码鞋垫的柔性抓取策略,支撑自动化分拣、入盒包装、码垛等产线环节的机器人落地,降低鞋企自动化改造的算法研发成本;在通用机器人技术研发领域,该数据集提供的多模态、真实工业场景操作数据,也可为灵巧操作技术的通用性研究提供数据支撑。作为垂直细分领域的工业数据集,本次发布的产品也进一步丰富了工业机器人训练数据的供给体系,对助力数据要素在智能制造领域的流通应用、推动轻工制造数字化转型具有积极意义。
查看huili_shoe_insole_retrieval_and_packing_0602
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)