

图尔库智能嵌入式和机器人系统实验室 本次发布的数据集 UWB-Based Infrastructure-Free Positioning and Multi-Robot Relative Localization Dataset, 本数据集由图尔库智能嵌入式和机器人系统实验室创建,主要用于评估无基础设施的UWB定位和多机器人相对定位技术。数据集包含24个子集,涵盖了多种场景,包括固定和移动节点,以及不同数量的节点配置。数据收集过程中使用了动作捕捉系统提供地面实况数据,并包括惯性或里程计测量,以支持传感器融合方法的基准测试。此外,数据集还包含了基于天线相对方向的测距精度测量,以及单对节点之间测距的全面测量。该数据集旨在解决多机器人系统中精确和鲁棒位置估计的问题,特别是在无外部基础设施支持的环境中。
查看UWB-Based Infrastructure-Free Positioning and Multi-Robot Relative Localization Dataset
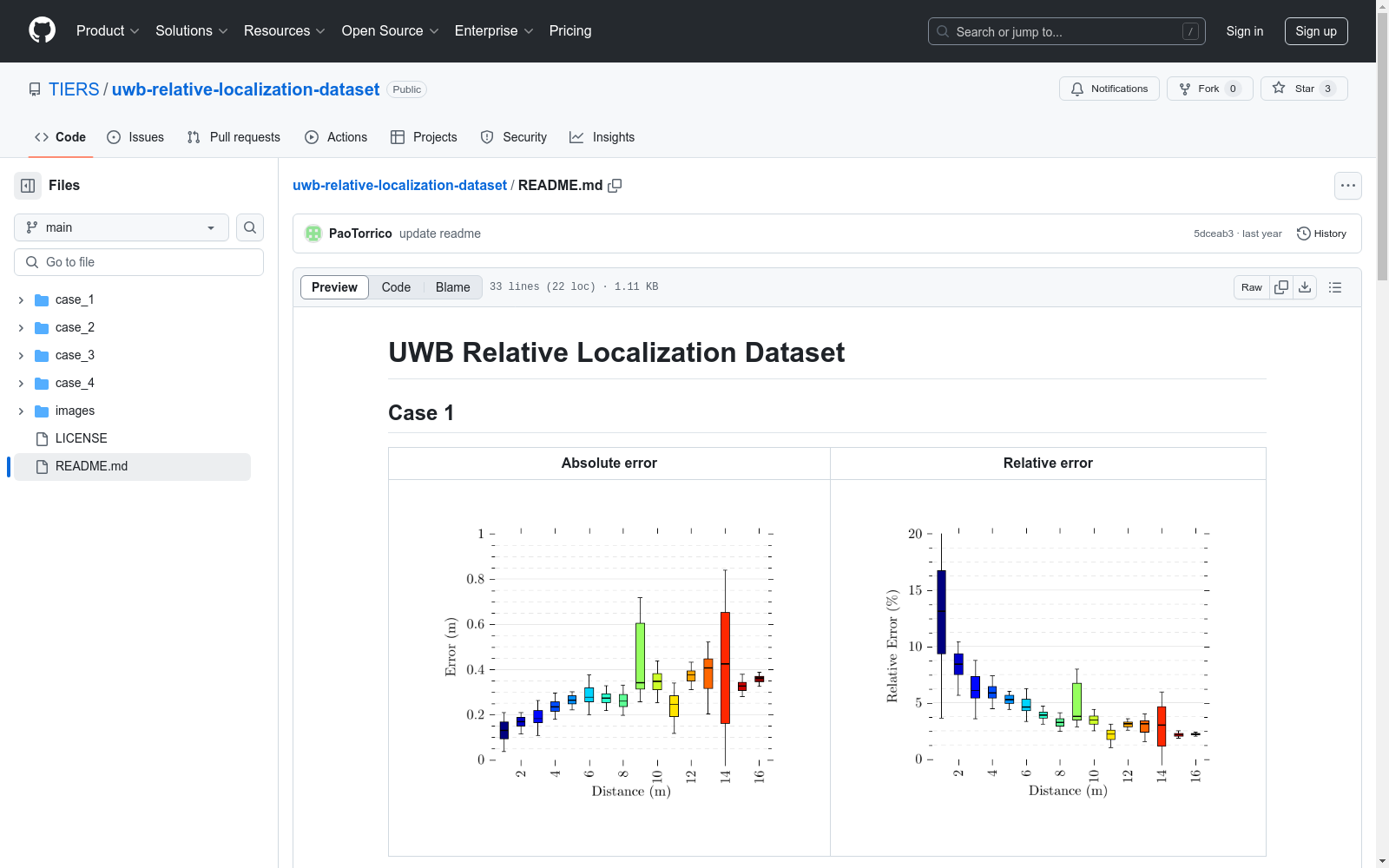
README 内容:
关于 arXiv , arXiv 是一个免费分发服务和开放获取的学术文章档案库,涵盖了物理学、数学、计算机科学、定量生物学、定量金融、统计学、电气工程和系统科学以及经济学等领域。该网站上的材料并未经过 arXiv 的同行评审。



_1769672084863.jpg)